Shopping Cart






In stock, shipping within 24h.
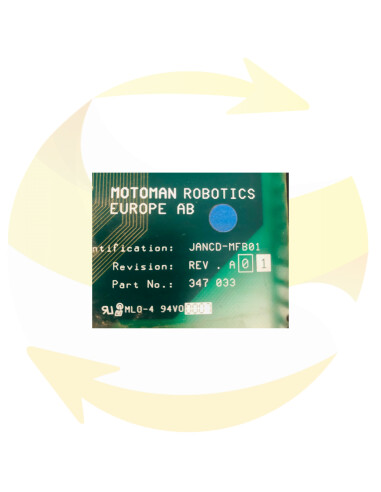
This interface board JANCD-MFB01-1 and YASKAWA is an interface board for XRC robot control unit.
Fieldbus system via standard AnyBus modules
This JANCD-MFB01-1 YASKAWA interface board is available to replace your defective equipment and has a guarantee adapted to your needs.

Reconditioned and tested systems
From 6 to 12
month warranty

New systems
From 12 to 24
month warranty

Reconditioned and tested systems
From 6 to 12
month warranty

New systems
From 12 to 24
month warranty

Sold for parts – no warranty

Repair will be made to damaged and defectiv units
From 3 to 18
month warranty



Instead of using traditional wiring to distribute input and output signals, the auto- mation industry more frequently relays on computer communications. By using communication systems cost for material, installation, documentation and mainte- nance can be greatly reduced. The communication system can also be used for more advanced features like connecting different control systems and to distribute the control functions to intelligent sub-systems, sensors and actuators.
The communication systems used for these tasks are commonly called a fieldbus system. Fieldbus systems are used in all sectors of automation: Factory automa- tion, manufacturing automation, assembly automation, building automation, proc- ess automation, etc.
Fieldbus protocols are based on ISO Reference Model for Open System Intercon- nection (OSI-RM), ISO 7498. However, Fieldbus uses only layers 1, 2, 7 of OSI- RM, layer 3 through 6 are often bypassed for real-time purpose. There is also a new User Layer added on top of the Application Layer, where distributed control strategy is implemented and which makes Fieldbus much more than a communi- cation network.
Different systems are used because of different technical requirements of the application. Those different requirements are different levels of bus systems, bus structures, real-time behaviour, amount of data being transferred, transmission media, distribution of power on the communication media. The difference between the technical demands and the fact that no system on the market fulfils all requirements has lead to a wide variety of different fieldbus systems.
A major problem is that many products need to be connected to many of the field- bus systems on the market. The same product may have to be able to exchange data over some or all the available fieldbus systems and by doing this fulfilling dif- ferent of the above mentioned requirements depending on the fieldbus system. One example are operator panels which must be able to connect on different lev- els of industrial network systems. In most applications on sensor/actuator level, in many applications on the process level but also on the factory network level.

Yaskawa The company was founded in 1915 and its headquarters is located in Kitakyushu, Japan.
The company is the world leading manufacturer of servo motors, converters, axis drives and control systems used in industrial automation, and Motoman robots.














{kind=link}
{kind=link}
{kind=link}
{kind=link}