Panier









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

En stock, prêt à partir
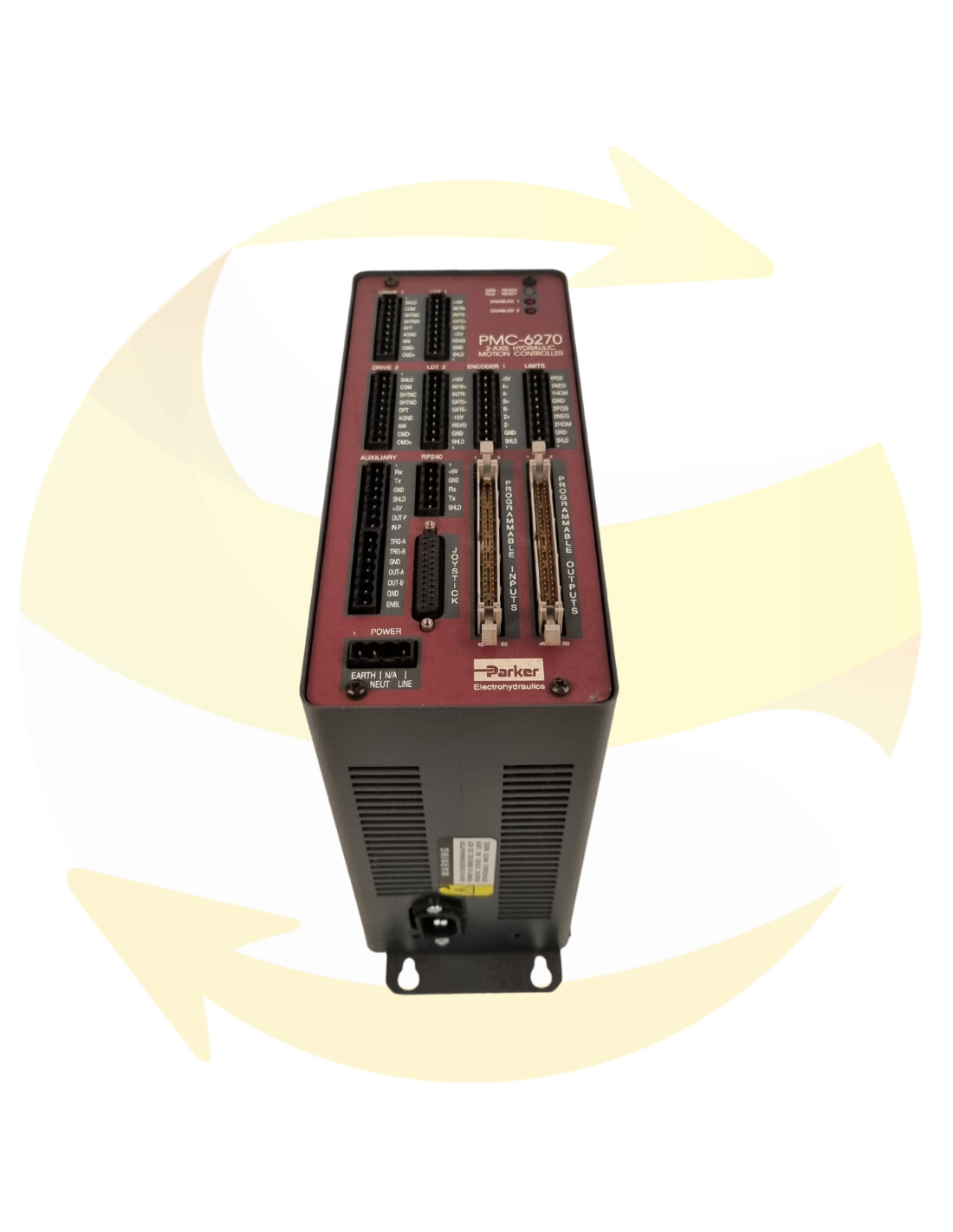
Ce contrôleur de mouvement de référence PMC-6270 et de marque PARKER est un variateur de la série 6000.
Contrôleur de mouvement pour servomoteur PMC-6270 : 120/240VAC, 2 axes
Ce contrôleur de mouvement PARKER est à votre disposition pour remplacer votre matériel défectueux et dispose d'une garantie adaptée à vos besoins.

Systèmes reconditionnés et testés
Garantie de
6 à 12 mois

Systèmes neufs
Garantie de
12 à 24 mois

Systèmes reconditionnés et testés
Garantie de
6 à 12 mois

Systèmes neufs
Garantie de
12 à 24 mois

Systèmes vendus pour pièces - sans garantie

Reconditionnement de systèmes endommagés
Garantie de
3 à 18 mois



Série 6000 . . . Une gamme puissante de contrôleurs et de logiciels
Il existe quatre contrôleurs de la série 6000 (indexeurs) qui fournissent une Sortie de tension analogique ±10V. Toutes les unités partagent les éléments suivants
Caractéristiques:
• Langage de programmation 6000 puissant
• Jusqu'à 28 entrées programmables et 26 entrées programmables les sorties
• Entrées rapides pour l'enregistrement de capture de position, etc.
• Entrées analogiques pour commande par joystick et entrée variable
• Entrées de fin de course et de limite d'origine pour chaque axe
• Retour codeur
• Logiciel fourni
– Architecte de mouvement
– Disque série 6000 basé sur DOS®
– Bibliothèque de liens dynamiques (DLL) à utiliser avec Microsoft® Application Windows™ et Microsoft Windows NT kits de développement
• Logiciel en option
– CAD-to-Motion (CompuCAM)
– VIs de mouvement pour LabVIEW® (Motion Toolbox)
– Serveurs d'échange dynamique de données (DDE)
– Logiciel basé sur des icônes graphiques (Motion Builder)
– Interface de contrôle personnalisée OCX (boîte à outils Motion OCX)
6200
• Un ou deux axes de step &commande de direction avec retour codeur
• Fonctionne de manière autonome ou interfaces avec PC, automates, et molettes
• Deux RS-232C ports de communication
• 150 000 octets de mémoire non volatile pour chemin du programme et stockage
• Spécifications complètes commencer sur C109
• 1 ou 2 axes de commande pour servomoteur en courant ou en tension systèmes ; rétroaction du capteur de déplacement linéaire (LDT) ou retour codeur incrémental (ou retour tension avec option ANI)
• Contrôle les servomoteurs électriques en mode vitesse ou couple
• Processeur de signal numérique (DSP) pour servocommande (proportionnel numérique, Rétroaction intégrale et de vitesse, plus accélération et vitesse Anticipation—PIV&F)
• Disque de support DOS fourni
• Motion Architect® pour Windows™ fourni
• Aide à la collecte et au réglage de données visuelles basée sur Windows™ disponible lors de l'utilisation de l'option Motion Architect® Servo Tuner™
• 40 000 octets de mémoire non volatile pour stocker les programmes ; 150 000 octets sont disponibles avec l'option -M
• Possibilité d'interrompre l'exécution du programme en cas d'erreur
• Mode d'apprentissage multi-axes
• Profilage de mouvement en S
• Interpolation linéaire 2 axes
• Suivi de rapport, suivi de position, avance & retard (voir 6000 Série suivant le guide de l'utilisateur pour plus de détails)
• Stockage de variables, branchement conditionnel et capacité mathématique
• Outils de débogage de programme — modes pas à pas et trace, points d'arrêt, et simulation d'E/S
• Alimentation universelle interne
• Interface directe avec le panneau de commande à distance RP240
• Fonctionne de manière autonome ou s'interface avec les PC et les automates
• Interface RS-232C à 3 fils vers PC ou borne muette
• Capacités d'E/S (toutes les E/S sont isolées optiquement) :
– Sortie de contrôle analogique ±10V (les deux axes)
– Sortie d'arrêt pour N.O. ou relais N.C. (les deux axes)
– Entrée Drive Fault (les deux axes)
– Entrée LDT (les deux axes)
– Entrée codeur incrémental (axe 1 uniquement)
– Entrées de fin de course CW & CCW (les deux axes)
– Entrée de limite d'origine (les deux axes)
– 3 entrées analogiques 8 bits pour le contrôle par joystick et entrée variable (0,0 V - 2,5 V)
– 2 entrées (déclenchement) — utilisées pour le verrouillage de position matériel
– 24 entrées programmables (compatibles Opto-22™)
– 24 sorties programmables (compatibles Opto-22™)
– 2 sorties programmables auxiliaires pouvant être configurées pour une sortie précise sur la position
• L'option 6270-ANI offre deux entrées analogiques ±10 V, 14 bits ; peut être utilisé pour le retour de position
Fondée en 1918, la société Parker Appliance Company a évolué pour devenir Parker Hannifin Corporation, reflétant ainsi un héritage d'innovation. Nous considérons que notre développement futur est assuré si nous respectons la tradition d'excellence de Parker.